Engineeering Projects
Project Progress Report #1
Ask:
For my capstone project, I decided to design and build a prosthetic hand that would be capable of gripping onto objects. The hand would be controlled with servo motors which would be controlled through the use of an Arduino Uno micro-controller. This would allow the servos to be controlled through input data and signals.
Research:
At first I found an online example hat called for the use of flex sensors to detect movement. I researched into this idea, but my instructor Mr. Berwanger informed me about the use of EMGs(Electromyography sensors) to detect electrical impulses from muscles. This was a far more interesting idea, so I decided to figure out a way to control servo motors through the use of electrical impulses from muscles. Ultimately, I decided to use the MyoWare EMG sensor. This sensor is easily compatible with the Arduino platform which made it a great option. I researched the necessary code to record outputs from the sensor the the Arduino serial output.
Imagine:
There were several possibilities I considered while researching my project, I could have uses stepper motors instead of servo motors, I could have used flex sensors instead of EMGs, and I could have controlled the hand remotely.
Planning:
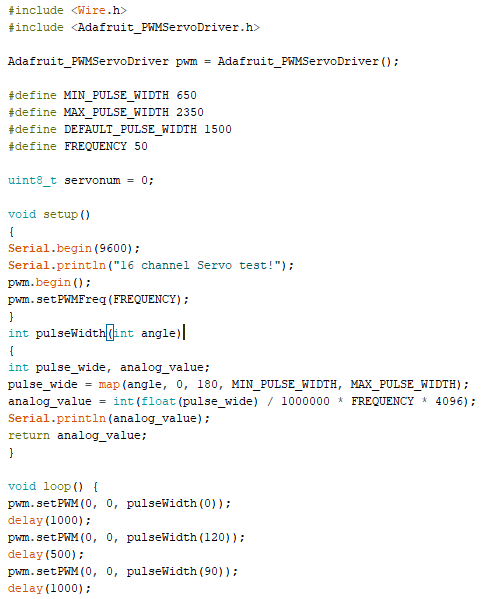
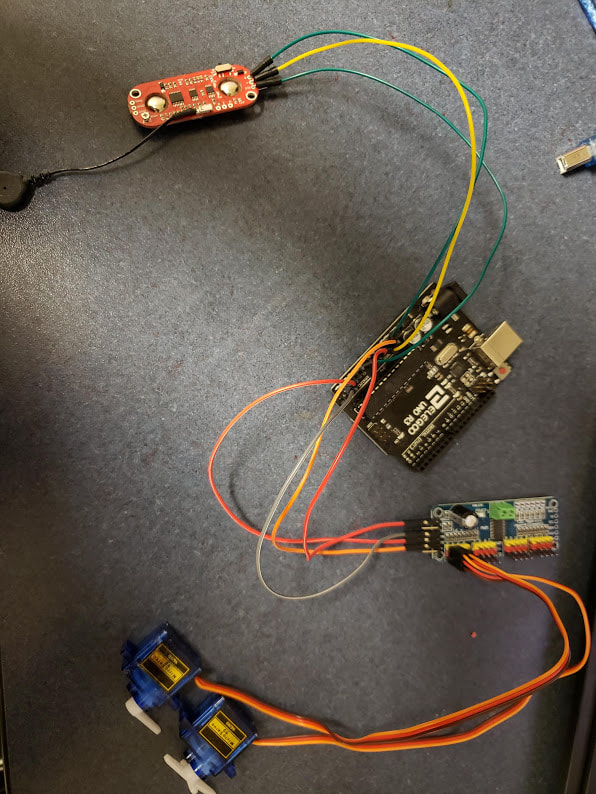
To plan for this project, I had to develop a code to start analyzing signals from the MyoWare Sensor(See picture below). Additionally I had to become familiar with the Arduino platform in order to control servo motors. I had to write code for the MyoWare sensor as well.
Ask:
For my capstone project, I decided to design and build a prosthetic hand that would be capable of gripping onto objects. The hand would be controlled with servo motors which would be controlled through the use of an Arduino Uno micro-controller. This would allow the servos to be controlled through input data and signals.
Research:
At first I found an online example hat called for the use of flex sensors to detect movement. I researched into this idea, but my instructor Mr. Berwanger informed me about the use of EMGs(Electromyography sensors) to detect electrical impulses from muscles. This was a far more interesting idea, so I decided to figure out a way to control servo motors through the use of electrical impulses from muscles. Ultimately, I decided to use the MyoWare EMG sensor. This sensor is easily compatible with the Arduino platform which made it a great option. I researched the necessary code to record outputs from the sensor the the Arduino serial output.
Imagine:
There were several possibilities I considered while researching my project, I could have uses stepper motors instead of servo motors, I could have used flex sensors instead of EMGs, and I could have controlled the hand remotely.
Planning:
To plan for this project, I had to develop a code to start analyzing signals from the MyoWare Sensor(See picture below). Additionally I had to become familiar with the Arduino platform in order to control servo motors. I had to write code for the MyoWare sensor as well.